

La trayectoria que un robot seguida durante la ejecución de una tarea es uno de los procesos más importantes a realizar por un autómata, el movimiento estará sujeto al conocimiento del entorno, si este es conocido la tarea será llevada a cabo con mayor precisión; sin embargo, si nos encontramos ante un entorno nuevo el éxito dependerá del aprovechamiento de los recursos que tengamos en pro de conocer nuestro nuevo entorno, es en este punto donde se aprovechan algoritmos de Machine Learning.
2.Algoritmos.
El primer trabajo es acerca de robots cuyo objetivo es clasificar desperdicios tales como botellas de plástico, cartones, etc. El proceso consiste en identificar un tipo de desperdicio mediante el procesamiento de imágenes con el método de coevolución y algoritmos como Support Vector Machine (SVM) luego de ello se estima la distancia euclidiana de los objetos al robot que escogerá el objeto, finalmente el robot escoje el recorrido más corto a realizar para la selección del objeto evitanto cualquier tipo de obstáculo.

Recorrido del robot clasificador de desperdicios.

Cámara y objetos a identificar.
En otro escenario de aplicación se analiza a un robot con cuerpo humanoide el cual tiene como tarea capturar un objeto de color rojo con la mano derecha evitando obstáculos como una mesa; se trata de un problema de planificación de movimientos en la robótica articulada.
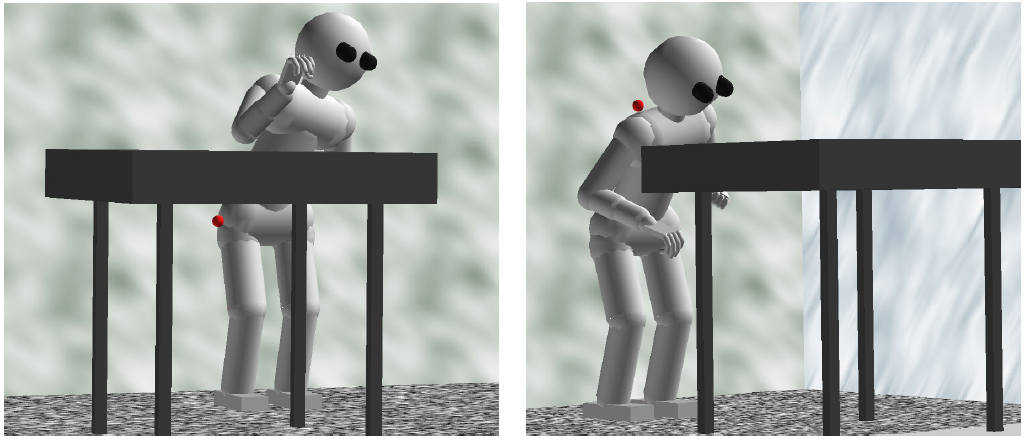
Dos situaciones de un robot cuyo objetivo es capturar un objeto de color rojo.
Los algoritmos usualmente calculan desde cero la trayectoria ante una nueva situación y no se aprovecha la data de trayectorias anteriores; para lograr esto se propone un descriptor de la nueva trayectoria, este es transferido usando IK (inverse Kinematics) para obtener un segundo descriptor de la trayectoria el cual permitirá una mejor adaptación a la nueva situación. El método usado para optimizar la trayectoria final es conocido como ILQG.Finalmente presentamos la trayectoria que sigue un robot para llegar a un determinado lugar apoyándose en su “visión” del entorno y sorteando los obstáculos que se presenten; para ello se entrena una Red Neuronal Convolucional (CNN) con la cual se procesan imágenes del estado en que se encuentra actualmente el entorno y establece puntos de referencia los cuales servirán para guiar al robot a llegar a su objetivo sin sufrir colisiones, para el mencionado entrenamiento se realiza el escaneo en 3D del entorno donde se realizarán las pruebas.
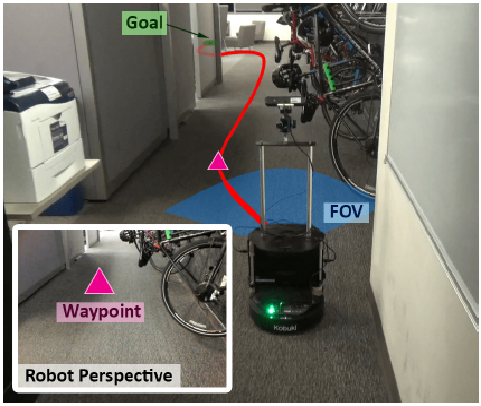
Trazado del recorrido de un robot en un escenario con obstáculos
3.Resultados de Pruebas.Los resultados en las pruebas de clasificación de desperdicios, se usó una cámara Omnidireccional la cual no tubo resultados a objetos que superaron los 280 cm de distancia respecto al robot, esto puede estar ligado al rango de detección de dicha cámara o a la influencia de la luz sobre los objetos.
Los resultados de las pruebas realizadas en el robot de cuerpo humanoide muestran a dos métodos como los más óptimos para predecir la trayectoria en ellos se obtuvieron un mejor rendimiento en cuanto a tiempo de ejecución y cantidad de fallas, estos son los llamados “Cluster” y “NNEuclid”.
Para el caso del robot que sortea obstáculos se realizaron comparación entre dos algoritmos modelos LB-WayPtNav vs E2E, el resultado fue apabullante, el primero pudo cumplir con las tareas asignadas mientras que en la segunda no logró llegar a su objetivo.
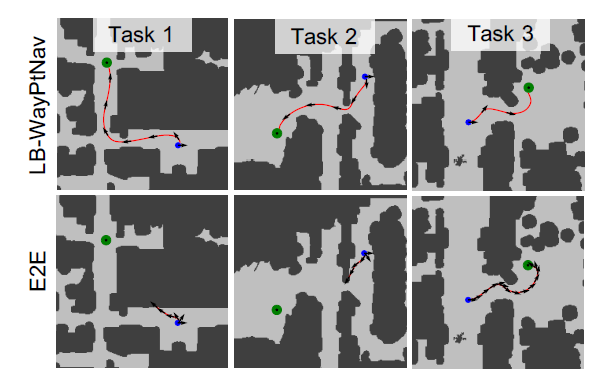
Vista en planta del recorrido del robot.
4.Librerías y Métodos Usados.SVM
ILQG.
ResNet-50
5.Conclusiones.
Machine Learning es una herramienta que ha sido empleada con éxito en la predicción de la trayectoria más óptima que un robot debe realizar sin llegar a colisionar con algún tipo de obstáculo, el espacio es conocido por dicho robot; sin embargo, será sometido a nuevas configuraciones de obstáculos.
6.Referencias.
“An Implementation of Multiobject Tracking Using Omnidirectional Camera for Trash Picking Robot”. In Proc. IEEE Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS) ’04, 2019. pp. 154–158.
“Combining Optimal Control and Learning for Visual Navigation in Novel Environments”. arXiv preprint arXiv:1903.02531. 2019.
“Trajectory prediction: learning to map situations to robot trajectories”. In Proc. ACM annual international conference on machine learning ’06, 2009. pp. 449–456.